Using Synthetic Data and Deep Networks to Recognize Primitive Shapes for Object Grasping
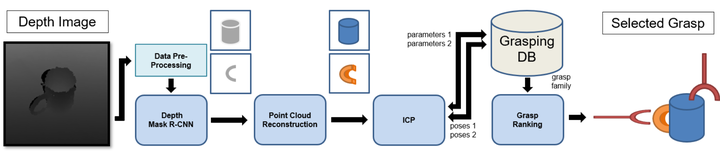 Grasping Pipeline
Grasping Pipeline
Abstract
A segmentation-based architecture is proposed to decompose objects into multiple primitive shapes from monocular depth input for robotic manipulation. The backbone deep network is trained on synthetic data with 6 classes of primitive shapes generated by a simulation engine. Each primitive shape is designed with parametrized grasp families, permitting the pipeline to identify multiple grasp candidates per shape primitive region. The grasps are priority ordered via proposed ranking algorithm, with the first feasible one chosen for execution. On task-free grasping of individual objects, the method achieves a 94% success rate. On task-oriented grasping, it achieves a 76% success rate. Overall, the method supports the hypothesis that shape primitives can support task-free and task-relevant grasp prediction.